| Underwater ROV |
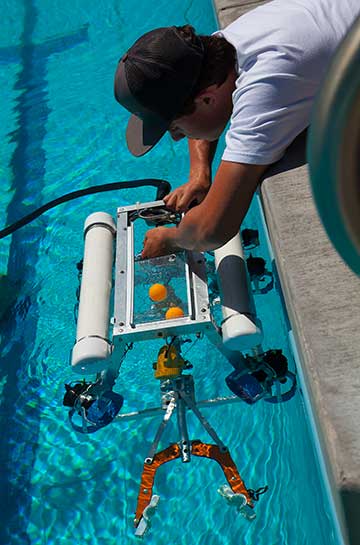
With their backs to the pool, the students had to operate the ROV using only what they saw in the video monitors..
Our vehicle had two movable, and 2 fixed video cameras. This was to simulate the true working conditions of an ROV. The operators are usually on a surface ship, with the ROV miles below the surface.
Sometimes it not so easy to tell what you're looking at.
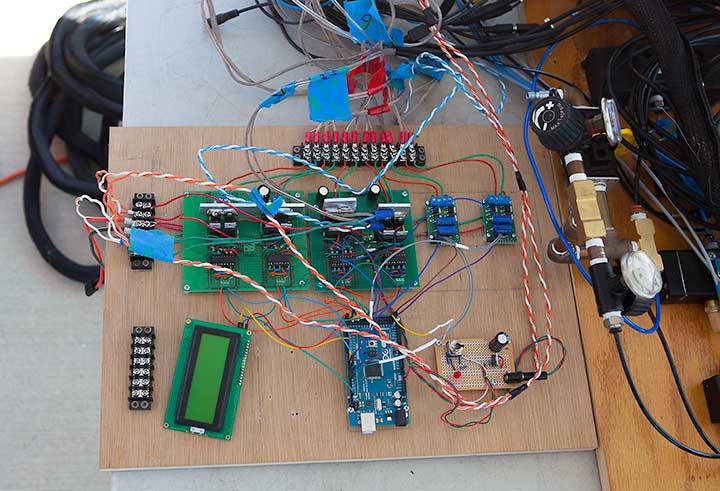
Early prototype of the hand built speed controllers (MOSFET H-Bridges) for the 8 propulsion motors, controlled by PWM signals from an Arduino being driven using BlueTooth from an X-Box controller, provided Forward/Back, Left/Right, Side to Side (crab), Up/Down and Yaw control.